 |
Ongoing Projects - since 2005
I am currently involved in several projects:
- Bio-inspired Vision-based Microflyers
- Biomimetic Jumping Microgliders
- The Eyebots
- Swarming MAVs for RF Communication Relay
- Solar Impulse Human-Machine Interface
- Aerial Robotics Initiative: AERO@EPFL |
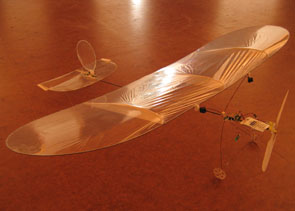 |
Bio-inspired Vision-based Flying Robots - phd project - 2001-2005
There are not yet autonomous flying robots capable of manoeuvring in small cluttered environments as insects do. Encouraged by this observation, this project focussed on the development of ultra-light flying robots and control systems going one step toward fully autonomous indoor aerial navigation. The substantial weight and energy constraints imposed by indoor flying robots preclude the use of powerful processors and active distance sensors. Moreover, flying systems require fast sensory-motor mapping despite their limited processing power.
[webpage] [book] [publications] [video] |
 |
3D Bow Leg Hopper - master project - 2000-2001
The Bow Leg hopper is a novel design for a locomoting robot that hops on a flexible, efficient leg. During my master project at CMU, Pittsburgh, I started the development and integration of the 3D version of this concept originally designed by Garth Zeglin.
[webpage] [report] [video clips]
|
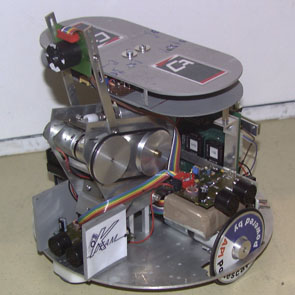 |
Zephyr: Robot competitions & semester project - 1999-2000
Zephyr is a small fire-fighting robot that could autonomously explore a model apartment with 4 rooms, detect fire (candles) and extinguish it. Developed by a team of five EPFL undergratduate students, this robot had a lot of success at several national and international robot competitions.
In parallel, we used this robot for experiments in behaviour-based robotics within the scope of an EPFL semester project.
[website] [report] [video] |
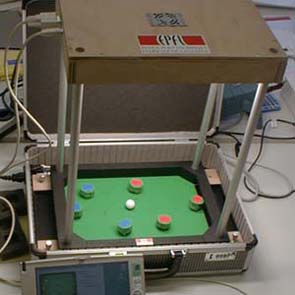 |
Alice soccer - semester project - 1999
The aim of the project was to conceive a system that would allow playing robotic soccer a miniature, portable soccer field not any larger than an A4 paper sheet with 6 suggar-cube robots. It included robust visual tracking of the robots and the ball, development of a TCP/IP server for 2 teams which can implement their own control on seperate computers, and setup of a demo game.
[webpage] [report] [video] |


